Research
ATOMIC Lab conducts system-oriented research on ultra-low-power intelligent platforms spanning wireless networking, sensing, localization, and edge AI. Our work emphasizes scalability, infrastructure-less operation, and cooperative intelligence under real-world constraints.
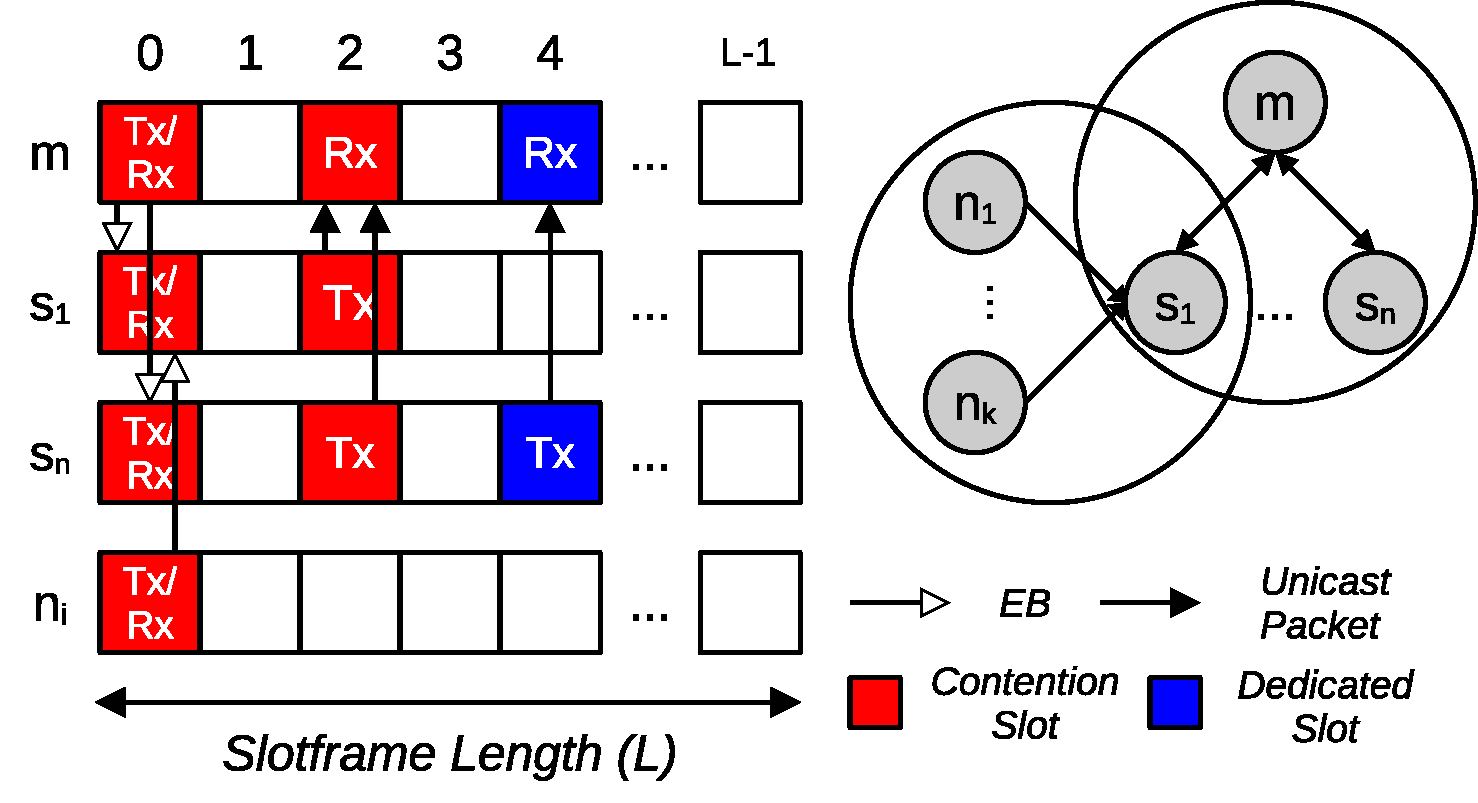
Low-Power Wireless Networking
We investigate time-synchronized and energy-efficient wireless networking technologies for dense, large-scale, and mobile systems. Our work focuses on reliability, synchronization, and cross-layer optimization under strict power constraints.
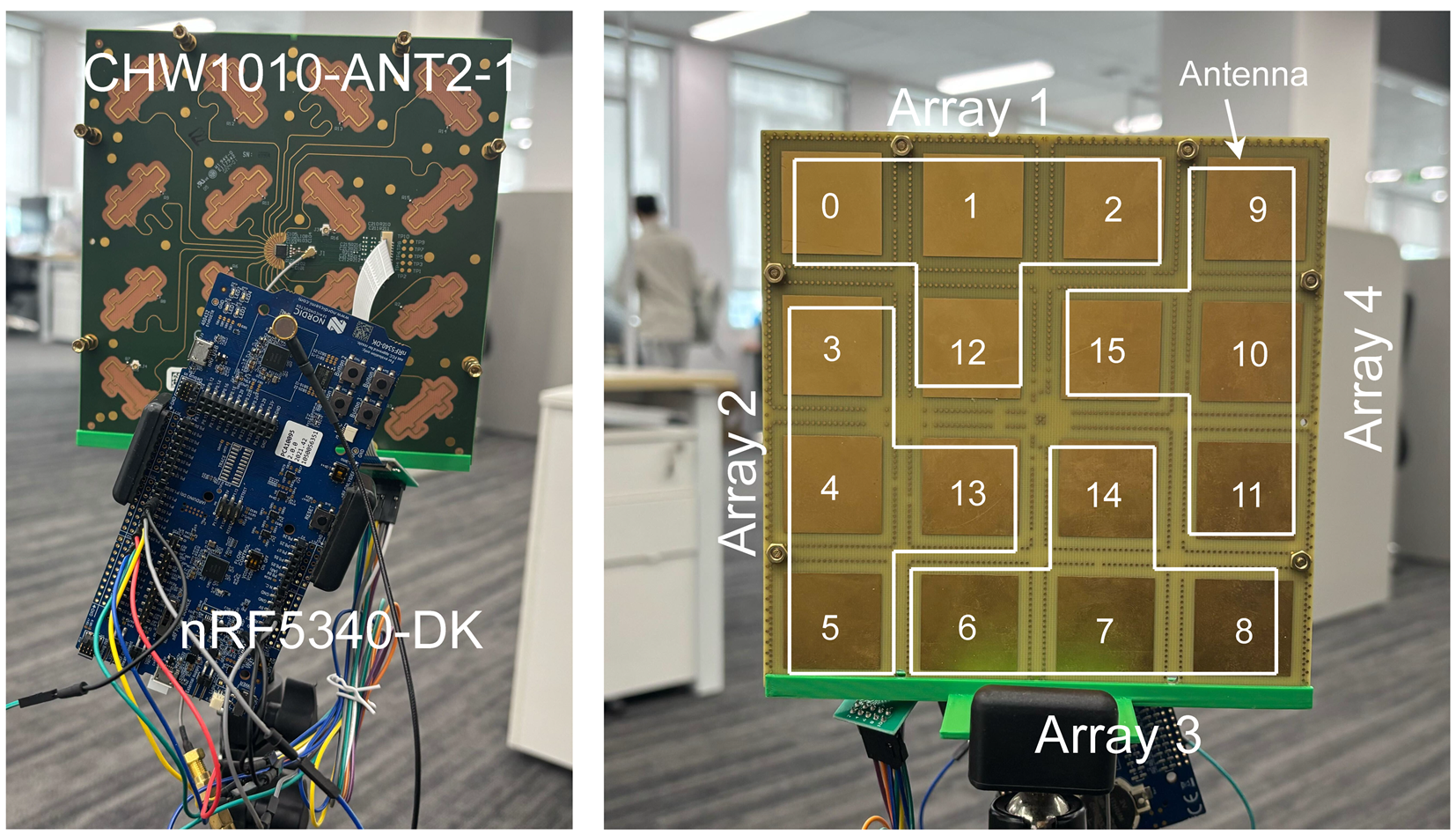
Micro-Integrated and Crystal-Free Systems
We explore micro-integrated circuit platforms that minimize size, cost, and power consumption. A key focus is understanding and compensating for clock instability in crystal-free systems through system-level co-design.
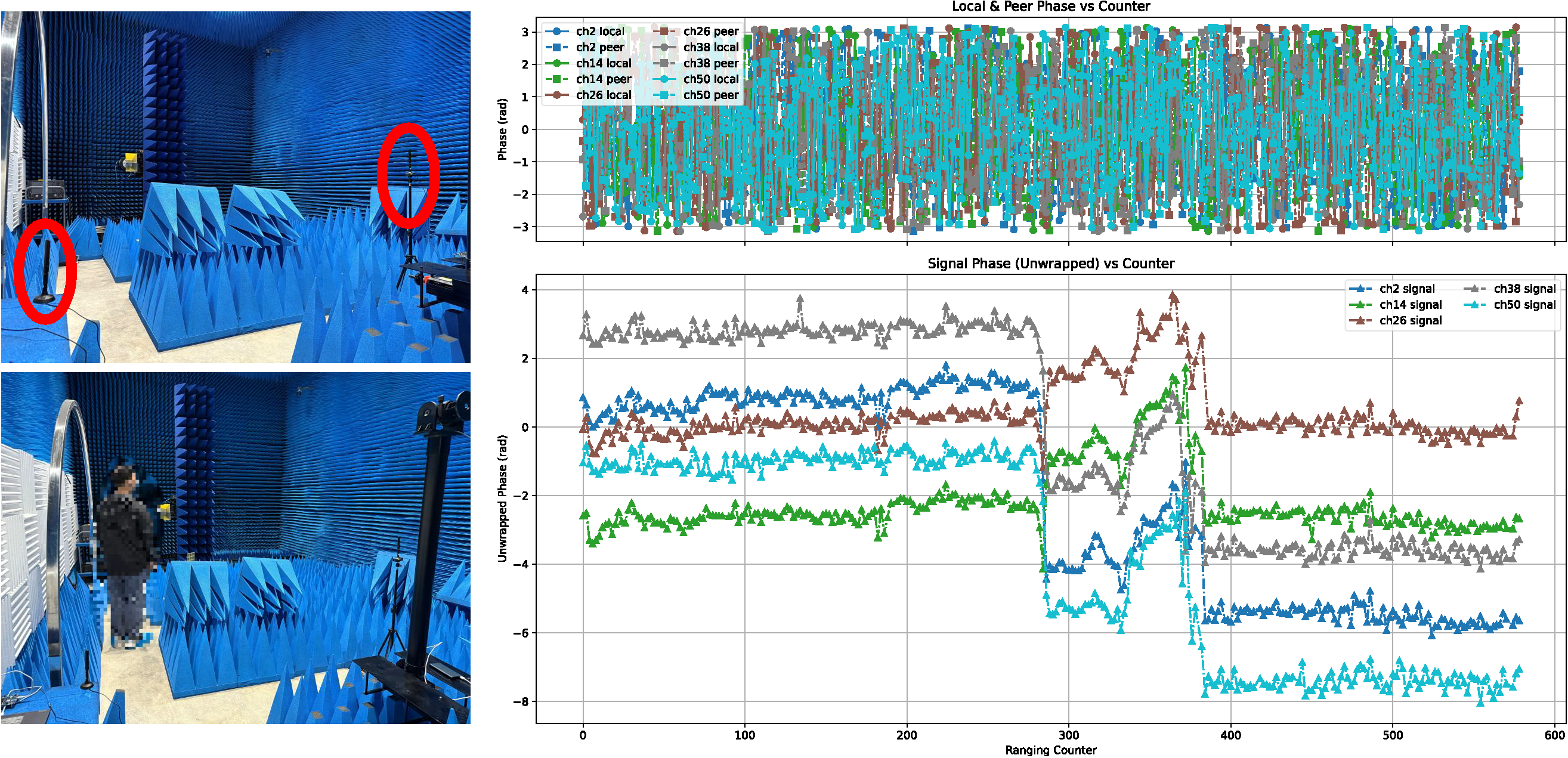
Large-Scale Infrastructure-Less Tracking and Localization
We develop tracking and localization systems that operate without fixed infrastructure such as cameras or anchors. Our research targets large-scale environments where deployment cost and accessibility prohibit traditional solutions.
Distributed Sensing and Sensor Fusion
We study how multiple sensing modalities and distributed nodes can be fused to achieve robust perception. Our work emphasizes probabilistic modeling, adaptive filtering, and resource-aware sensor fusion.
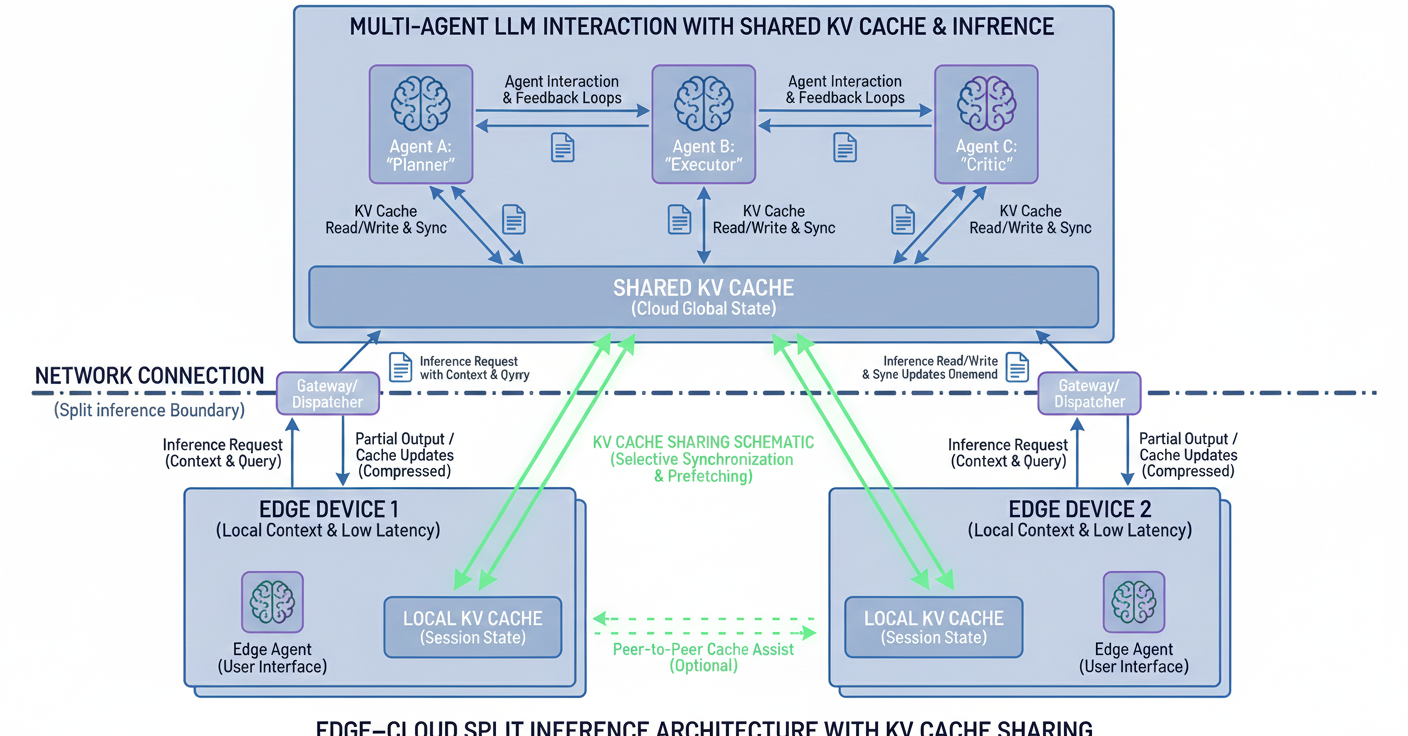
Edge AI Systems and Multi-Agent LLM Inference Optimization
We investigate edge AI systems that enable intelligent services under strict resource constraints. A key focus is optimizing LLM inference through multi-agent collaboration, shared context, and efficient memory management.
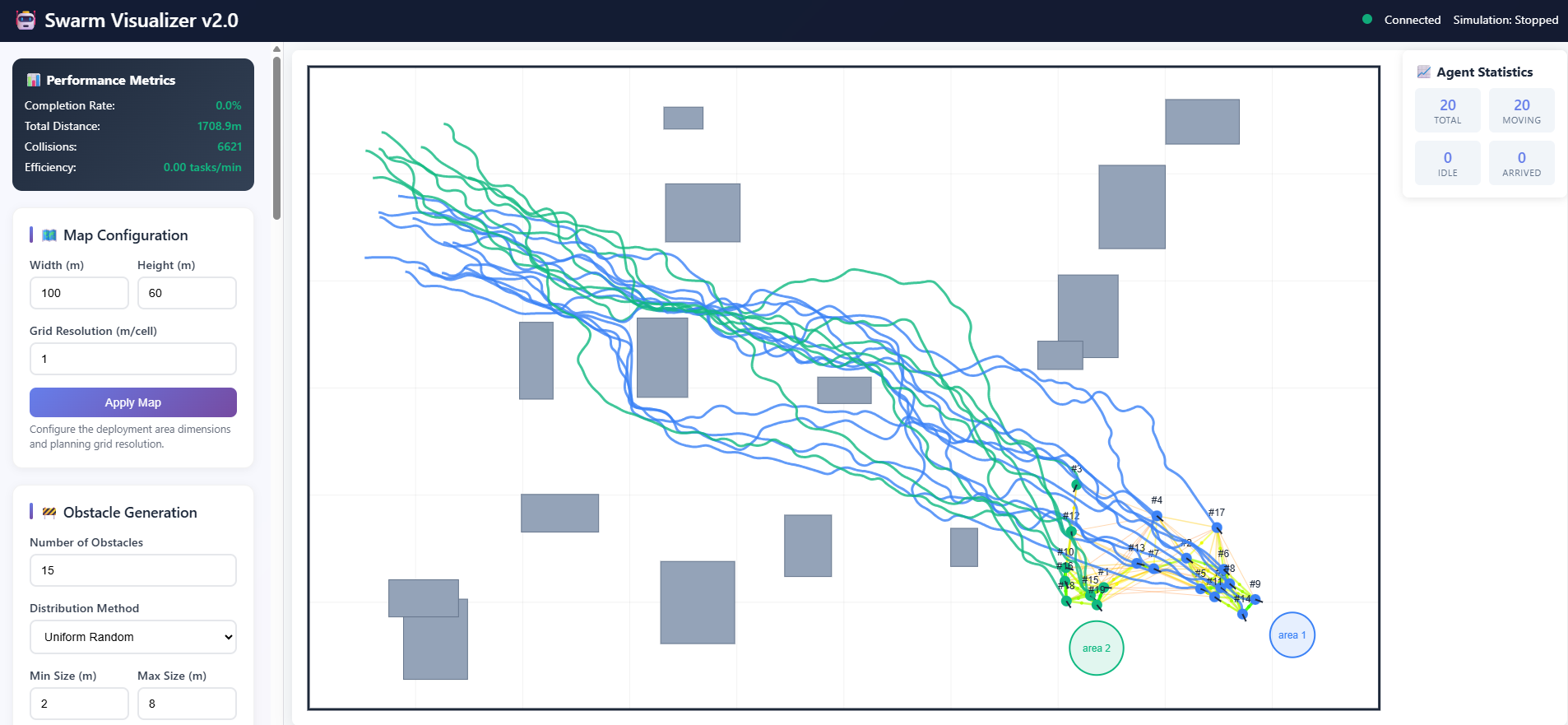
Swarm Robotics and Cooperative Intelligence
We investigate how large numbers of simple robots can coordinate through wireless communication and local sensing. Our research focuses on scalability, robustness, and minimal assumptions about global coordination.